When designing a control strategy for an electronic circuit we have to be able to model the circuit in mathematical expression. This time I will show how to derive a mathematical expression of the input and output of a buck converter circuit.
This time we just simply use KCL and KVL to derive the mathematical expression of the Buck converter.
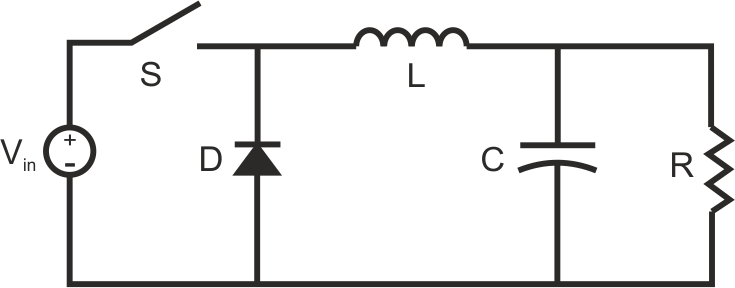
The picture above is the simplified circuit of a buck converter. The switching device, Transistor, is replaced with a simple on-off switch for simplicity.
Now we will analyze the circuit based on the state of the switching device. First, let’s analyze when the switch S is close then the diode D will be reverse biased. The circuit’s current and voltage are described in the picture below.
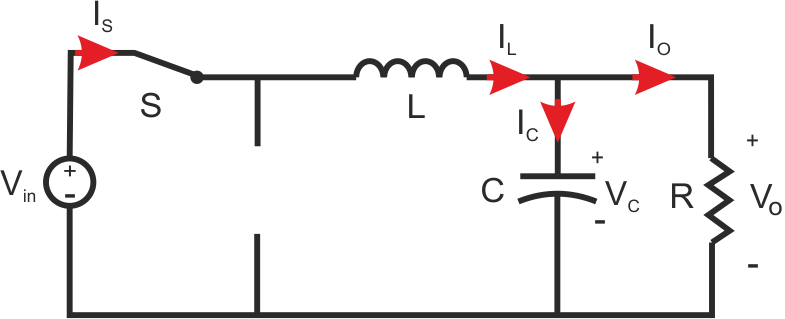
State I, 0< t <dTs
![\[L\frac{d{i}_{L}}{dt} = {v}_{in} - {v}_{o} \]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-19eea58a387a0135a0f142bc85ae7793_l3.png "Rendered by QuickLaTeX.com")
![\[C\frac{{v}_{c}}{dt} = {i}_{L} - {i}_{o}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-159fed1ba72906115e790c0bfd0afcd5_l3.png "Rendered by QuickLaTeX.com")
![\[{v}_{o} = {v}_{c}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-4f07f71f209ae6039f8629b50f50f183_l3.png "Rendered by QuickLaTeX.com")
Now, let’s analyze the circuit when switch S is open and this time the diode D will be forward-biased. The circuit’s current and voltage are described in the picture below.
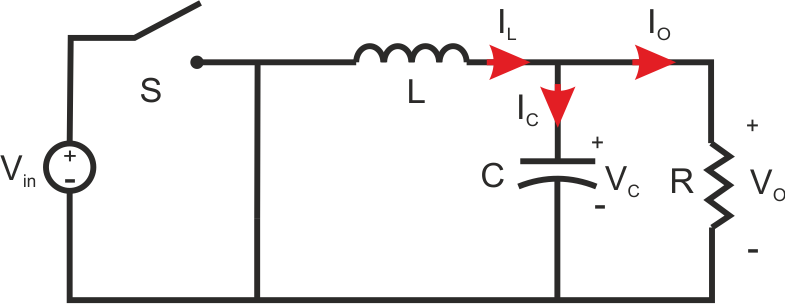
State II, dTs< t <Ts
![\[L\frac{d{i}_{L}}{dt} = - {v}_{o} \]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-77a2b7777ce515f9be583a04f3801f70_l3.png "Rendered by QuickLaTeX.com")
The next step is calculating the averaged differential equations over one switching cycle.
![\[L\frac{d{i}_{L}}{dt} = d\left({v}_{in}- {v}_{o}\right) + \left(1- d\right)\left(- {v}_{o}\right) \]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-59bc38a57794395b0f77f09e60ae131e_l3.png "Rendered by QuickLaTeX.com")
![\[L\frac{d{i}_{L}}{dt} = d{v}_{in}- {v}_{o}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-63253be67a04d393fdeaa68d9efef512_l3.png "Rendered by QuickLaTeX.com")
![\[C\frac{d{v}_{c}}{dt} = d\left({i}_{L} - \frac{{v}_{o}}{R}\right) + \left(1 - d\right)\left({i}_{L} - \frac{{v}_{o}}{R}\right)}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-ea616d0470df6800175a4d1fea6fc7c7_l3.png "Rendered by QuickLaTeX.com")
![\[C\frac{d{v}_{c}}{dt} = {i}_{L} - \frac{{v}_{o}}{R}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-a27b1db72e3cf7dbcaf01267db8d5738_l3.png "Rendered by QuickLaTeX.com")
![\[{v}_{o} = d\left({v}_{c}\right) + \left(1 - d\right)\left({v}_{c}\right)\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-54c444ab373ec0ffa6f93990ca458d12_l3.png "Rendered by QuickLaTeX.com")
As can be seen from the equation above the term dvin contains both the input vin and the control variable d, so the classical control theory cannot be implemented. In order to get a linear model we need to apply a perturbation on each variable. The idea is on the steady state we assume that each of these variables will contain a DC component and a small AC component. The equation before will be like below.
![\[L\frac{d\left({I}_{L} + {\widetilde{i}}_{L}\right)}{dt} = \left(D + \widetilde{d}\right)\left({V}_{s} + {\widetilde{v}}_{s}\right) - \left({V}_{o} + {\widetilde{v}}_{o}\right)\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-0747b7523813fa422887a84ee7201cab_l3.png "Rendered by QuickLaTeX.com")
![\[L\frac{d{\widetilde{i}}_{L}}{dt} = \underset{dc}{D{V}_{s}} + \underset{ss}{D{\widetilde{v}}_{s}} + \underset{ss}{\widetilde{d}{V}_{s}} + \underset{ho}{\widetilde{d}{\widetilde{v}}_{s}} - \underset{dc}{{V}_{o}} - \underset{ss}{{\widetilde{v}}_{o}}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-1bab60b8a7f42517bfaa4b40171dbdce_l3.png "Rendered by QuickLaTeX.com")
![\[C\frac{d\left({V}_{c} + {\widetilde{v}}_{c}\right)}{dt} = \left({I}_{L} + {\widetilde{i}}_{L}\right) - \frac{1}{R}\left({V}_{o} + {\widetilde{v}}_{o}\right)\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-614b8a2168fc15d55a951c3744be9b65_l3.png "Rendered by QuickLaTeX.com")
![\[C\frac{d{\widetilde{v}}_{c}}{dt} = \underset{dc}{{I}_{L}} + \underset{ss}{{\widetilde{i}}_{L}} - \underset{dc}{\frac{{V}_{o}}{R}} - \underset{ss}{\frac{{\widetilde{v}}_{o}}{R}}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-3278d8a813fca8cc4d3cf7a3d48b2035_l3.png "Rendered by QuickLaTeX.com")
![\[{V}_{o} + {\widetilde{v}}_{o} = {V}_{c} + {\widetilde{v}}_{c}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-c5270ba750c927aadf3b7e994515cb5b_l3.png "Rendered by QuickLaTeX.com")
![\[{\widetilde{v}}_{o} = \underset{dc}{{V}_{c}} + \underset{ss}{{\widetilde{v}}_{c}}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-878efc34a91f2c9e36cc08155488a4b2_l3.png "Rendered by QuickLaTeX.com")
Note:
dc means the DC component
ss means the small-signal component
ho means the high-order component
From the equations above we can extract the DC component which will be useful to analyze the circuit at steady-state and we can also extract the AC small-signal component as well which then will be used to design our control strategy.
First, let’s extract the DC component.
![\[0 = D{V}_{s} - {V}_{o}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-e620864c443858de318cd1f6f0d47186_l3.png "Rendered by QuickLaTeX.com")
![\[0 = {I}_{L} - \frac{{V}_{o}}{R}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-e8f56868dae0d3272fce9ad4413767bb_l3.png "Rendered by QuickLaTeX.com")
![\[{V}_{c} = {V}_{o}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-ffe210d508e78ad972973f1e4aa4dc1e_l3.png "Rendered by QuickLaTeX.com")
Note :
At steady-state
The inductor voltage = 0
The capacitor current = 0
Now, let’s see what we have for the small-signal component
![\[L\frac{d{\widetilde{i}}_{L}}{dt} = D{\widetilde{v}}_{s} + \widetilde{d}{V}_{s} - {\widetilde{v}}_{o}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-833f773d947cffdc4db4947f0135d79c_l3.png "Rendered by QuickLaTeX.com")
![\[C\frac{d{\widetilde{v}}_{c}}{dt} = {\widetilde{i}}_{L} - \frac{{\widetilde{v}}_{o}}{R}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-6d7008f9ec9c9e23af06ffbb8664bb80_l3.png "Rendered by QuickLaTeX.com")
![\[{\widetilde{v}}_{o} = {\widetilde{v}}_{c}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-2689f2aea4759fcd775d54c2bc1c605e_l3.png "Rendered by QuickLaTeX.com")
The next step is to apply the Laplace transformation to our small-signal equations in order to express them in the frequency domain.
![\[sL{\widetilde{i}}_{L}\left(s\right) = D{\widetilde{v}}_{s}\left(s\right) + \widetilde{d}\left(s\right){V}_{s} - {\widetilde{v}}_{o}\left(s\right)\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-d0403da368287276d4817ca7565f2181_l3.png "Rendered by QuickLaTeX.com")
![\[sC{\widetilde{v}}_{c}\left(s\right) = {\widetilde{i}}_{L}\left(s\right) - \frac{{\widetilde{v}}_{o}}{R}\left(s\right)\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-c8d88d5fee393e47c58260e5a5faa761_l3.png "Rendered by QuickLaTeX.com")
![\[{\widetilde{v}}_{o}\left(s\right) = {\widetilde{v}}_{c}\left(s\right)\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-6893b31032542acb554dc70345d48875_l3.png "Rendered by QuickLaTeX.com")
Now, we can perform the algebra to eliminate the vc(s) and iL(s). First, we can rearrange the second equation to express the iL(s) as the equation below.
![\[sC{\widetilde{v}}_{c}\left(s\right) = {\widetilde{i}}_{L}\left(s\right)- \frac{{\widetilde{v}}_{o}}{R}\left(s\right)\rightarrow {\widetilde{i}}_{L} = sC{\widetilde{v}}_{c}\left(s\right) + \frac{{\widetilde{v}}_{o}}{R}\left(s\right)\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-5a89938bac19a5326b4de376ad7ae927_l3.png "Rendered by QuickLaTeX.com")
Now, we substitute it to the first equation then we will get the first equation as below,
![\[sL\left(sC{\widetilde{v}}_{c}\left(s\right) + \frac{{\widetilde{v}}_{o}}{R}\left(s\right)\right) = D{\widetilde{v}}_{s}\left(s\right) + \widetilde{d}\left(s\right){V}_{s} - {\widetilde{v}}_{o}\left(s\right)\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-7af6db9857c11fb427ca6fa4a05bdcd2_l3.png "Rendered by QuickLaTeX.com")
Finally, we can express the output as:
![\[{\widetilde{\boldsymbol v}}_{\boldsymbol o}\left(\boldsymbol s\right) = \frac{\boldsymbol D{\widetilde{\boldsymbol v}}_{\boldsymbol s}\left(\boldsymbol s\right) + \widetilde{\boldsymbol d}\left(\boldsymbol s\right){\boldsymbol V}_{\boldsymbol s}}{\boldsymbol L\boldsymbol C\boldsymbol s^2 + \frac{\boldsymbol L}{\boldsymbol R}\boldsymbol s + 1}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-e9cd669f3d722707df9568dfd6ba5d15_l3.png "Rendered by QuickLaTeX.com")
For our control design, we will need the control-to-output transfer function which is expressed as the equation below.
![\[{\left(\frac{{\widetilde{\boldsymbol v}}_{\boldsymbol o}\left(\boldsymbol s\right)}{\widetilde{\boldsymbol d}\left(\boldsymbol s\right)}\right)}_{{\widetilde{\boldsymbol v}}_{\boldsymbol s} = 0} = \frac{{\boldsymbol V}_{\boldsymbol s}}{\boldsymbol L\boldsymbol C\boldsymbol s^2 + \frac{\boldsymbol L}{\boldsymbol R}\boldsymbol s + 1}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-7c1b775ee1293028b3d099d6ecf0c0de_l3.png "Rendered by QuickLaTeX.com")