PLECS simulation files:
The Ćuk converter is a low ripple current buck-boost converter. A Ćuk converter combines a boost and buck converter with a single switching device and a mutual capacitor to couple energy.[1] This converter has two inductors and two capacitors that produce a fourth-order transfer function. This fourth-order transfer function will make designing a controller for the Cuk converter quite challenging.
1. Designing a type III controller for the Cuk converter
1.1. Calculating the transfer function of the Cuk converter.
| Parameters | Values |
| Output voltage, Vo | 24 V |
| Duty cycle, D | 0.667 |
| Capacitor 1, C1 | 20 uF |
| Capacitor 2, C2 | 20 uF |
| Inductor 1, L1 | 0.5 mH |
| Inductor 2, L2 | 7.5 mH |
| Inductor ESR, rL1 | 0.01 Ohm |
| Inductor ESR, rL2 | 0.01 Ohm |
| Load, R | 30 |
The transfer function of the Cuk converter can be calculated using a MATLAB script. Download the MATLAB script file SSA_Cuk_converter (don’t forget to copy and paste the new transfer function to the Vo_d variable, because on this script, this step can’t be done automatically somehow)
After running this script we can check the stability (phase margin, and gain margin) and the poles zeros location.
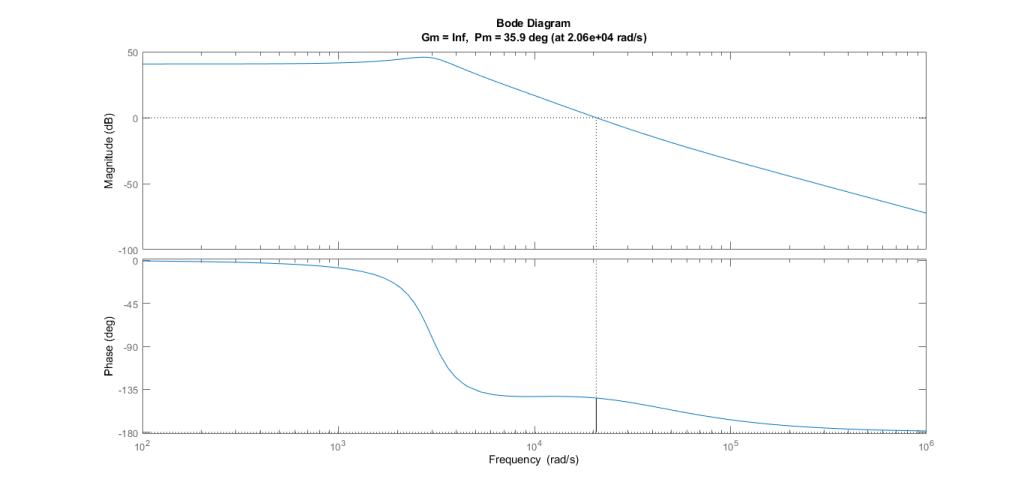
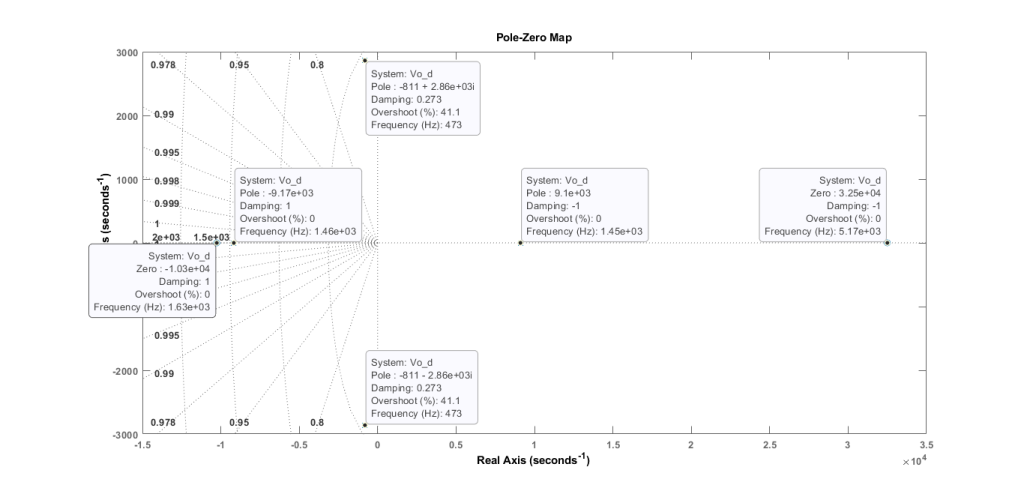
As can be seen from the Pole-Zero Map above the studied Cuk converter has poles zeros location at:
| Poles | Frequency (Hz) |
| fGvd_p1,2 , fGvd_p3(RHP) , fGvd_p4 | 473 Hz , 1450 Hz , 1450 Hz |
| Zeros | Frequency (Hz) |
| fGvd_z1 , fGvd_z2(RHP) | 1630 Hz , 5170 Hz |
There is an RHP zero on this transfer function that can affect the phase margin of the studied Cuk converter. Apart from this, another zero at a high frequency (1630 Hz) contributes to an increase in the gain of the high-frequency output ripple.
1.2 Placing the Poles and Zeros of the Type III Compensator
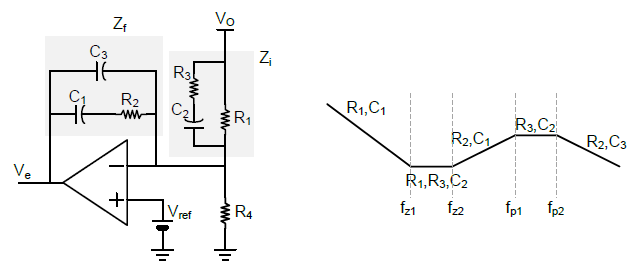
- The type III compensator has three poles and two zeros. The first poles will be placed at a low frequency, fp0 = low frequency, which will be beneficial to increase the DC gain of the Cuk converter to achieve zero steady-state error.
- The two zeros are placed around the resonant frequency of the converter. It is a good trial to place them at fz1 = 0,6.fGVD_p1,2 and fz2 = 1,2.fGVD_p1,2.
- The second pole of the compensator will be used to compensate the RHP zero. It is a good trial to place it at fp1= 2.fGVD_z1(RHP). This compensation pole is placed in such a location to make sure we can still gain a small benefit in the form of increased gain from RHP zero.
- The third pole of the compensator will be used to compensate for the high-frequency zero. It is a good trial to place it at fp2= fGVD_z2.
There is a well-documented analysis to determine the resistor and capacitor values of the type III compensator made by TI (SLVA662)
Initially, we have to select R1 then we can proceed with the below calculation.
![\[{C}_{1} = \frac{{f}_{p2} - {f}_{z2}}{2\pi \times {R}_{1}{f}_{p0}{f}_{p2}} \]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-4f33a31d4c7b10a40ba6a9c44ee54b61_l3.png "Rendered by QuickLaTeX.com")
![\[{C}_{2} = \frac{{f}_{p1} - {f}_{z1}}{2\pi \times {R}_{1}{f}_{p1}{f}_{z1}}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-37c3637d5e85d1bf8b19501547b7f559_l3.png "Rendered by QuickLaTeX.com")
![\[{C}_{3} = \frac{{f}_{z2}}{2\pi \times {R}_{1}{f}_{p0}{f}_{p2}}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-afcc976e438b5af32c1ee2a1fe423e2b_l3.png "Rendered by QuickLaTeX.com")
![\[{R}_{2} = \frac{{R}_{1}{f}_{p0}{f}_{p2}}{\left({f}_{p2} - {f}_{z2}\right){f}_{z2}} \]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-11e3662cc41980876c82d8f32d475def_l3.png "Rendered by QuickLaTeX.com")
![\[{R}_{3} = \frac{{R}_{1}{f}_{z1}}{\left({f}_{p1} - {f}_{z1}\right)}\]](https://sawitray.com/wp-content/ql-cache/quicklatex.com-fb9793ae399dd92943910ef38a5db993_l3.png "Rendered by QuickLaTeX.com")
| Values | |
| R1 | 5.5 MOhm |
| R2 | 35 kOhm |
| R3 | 154 kOhm |
| C1 | 8 nF |
| C2 | 0.1 nF |
| C3 | 2.8 nF |
Now, we can use these capacitor and resistor values on the MATLAB script to check the new loop gain bode plot.
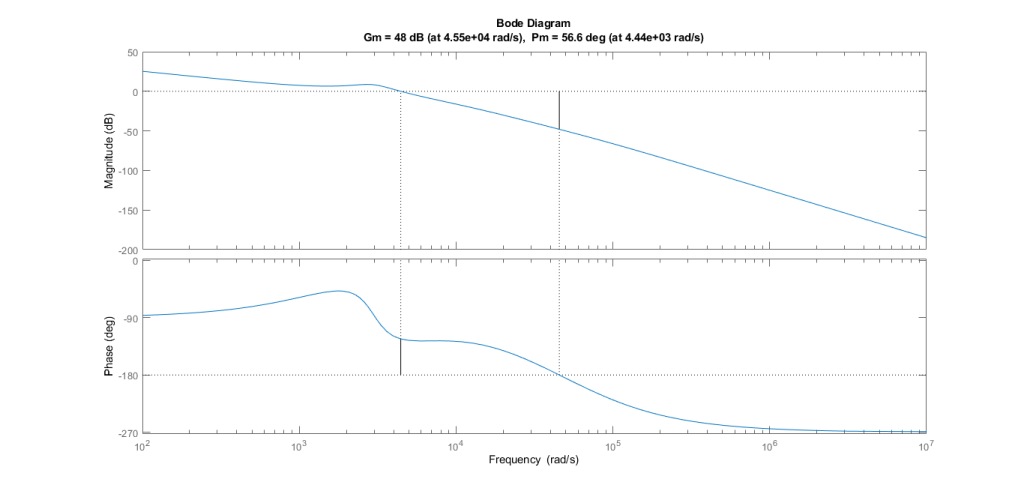
The picture is the bode plot of the loop gain (Gvd(s) x H(s)). As can be seen from the picture above the gain margin and the phase margin have increased compared with the uncompensated bode plot.
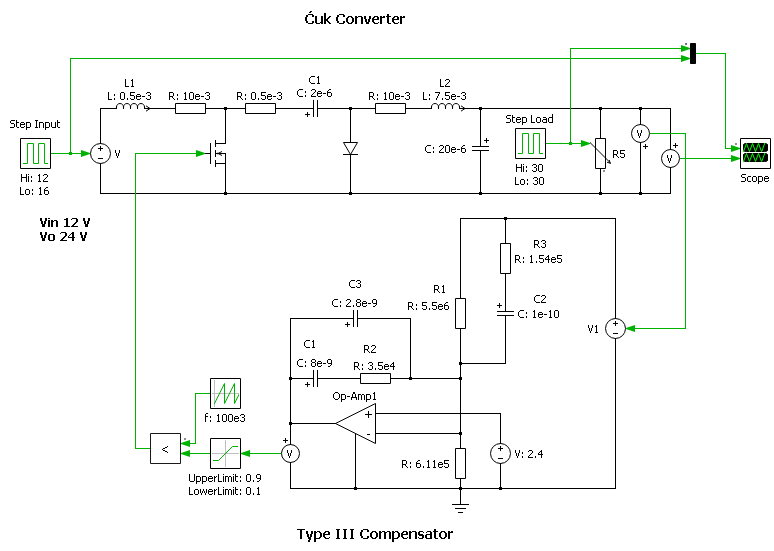
1.3 Simulation of the Cuk Converter with Type III Compensator
The simulation was done on PLECS 4.7.5. Download the simulation file PLECS_cuk_converter.
All of the resistor and capacitor values that we got from the previous calculation are applied to the schematic as shown in the picture below.
1.3.1 Input Step Response
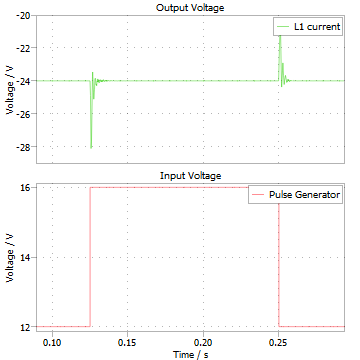
The performance of the compensator has been proven that able to regulate the output voltage despite changes in the input voltage from 12 V to 16 V.
1.3.2 Output Load Step Response
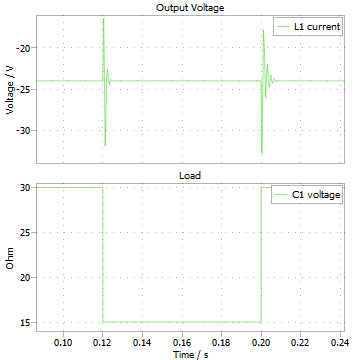
This time we apply a variation on the output load from 30 ohm to 10 ohm.
That is the simple step that I know about how to design a type III compensator for a Cuk converter.
Leave a Reply